
TOWING TANK FOR MANOEUVRES IN CONFINED WATER
Introduction

Flanders Hydraulics Research (Antwerp, Belgium), the hydraulic research laboratory of the department of Mobility and Public Works of the Flemish Government, Belgium, is concerned with the investigation of ship hydrodynamics in relation with the design, adaptation and operation of navigation areas. As the study of ship behaviour in confined areas often requires model tests, experimental facilities were developed in 1992-93. At present, they consist of a shallow water towing tank, equipped with a planar motion carriage, a wave generator and an auxiliary carriage for ship-ship interaction tests. The facilities are fully computer controlled and operated, both in captive and in free running mode, so that experimental programs are running day and night, 7 days a week.
The Towing Tank for Manoeuvres in Confined Water (co-operation Flanders Hydraulics Research and Ghent University) was accepted as a member organisation of the ITTC (International Towing Tank Conference) in 1993.
Full Description
A full description of the towing tank is given by Delefortrie et al (2016).Main dimensions
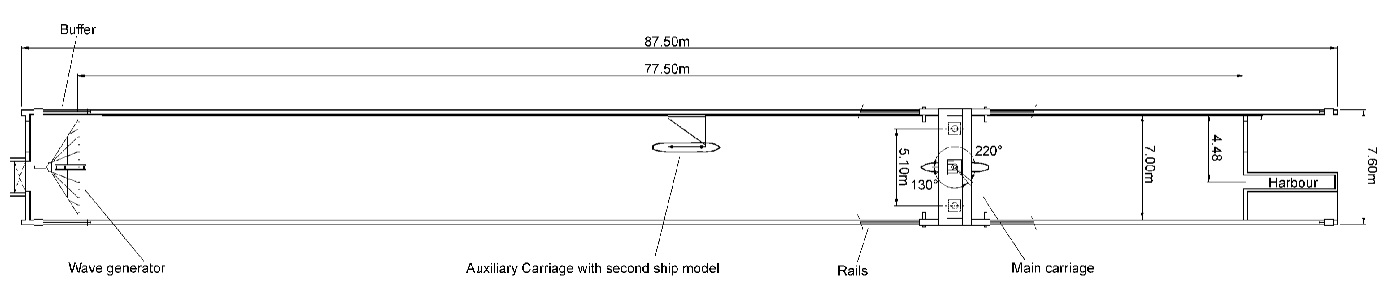
| Total length | 88.0 m |
| Effective length | 67.0 m |
| Width | 7.0 m |
Carriage
The rails on which the carriage moves are aligned with high accuracy: the level difference of both rails and the lateral deflection of the guiding rail are less than 0.5 mm.
The main carriage is a rectangular frame, composed of two wheel girders, connected by two box girders. A lateral carriage is guided between the transversal girders and carries a slide in which a yawing table is incorporated. This slide can be positioned in vertical sense over 0.4 m to take account of the water level.
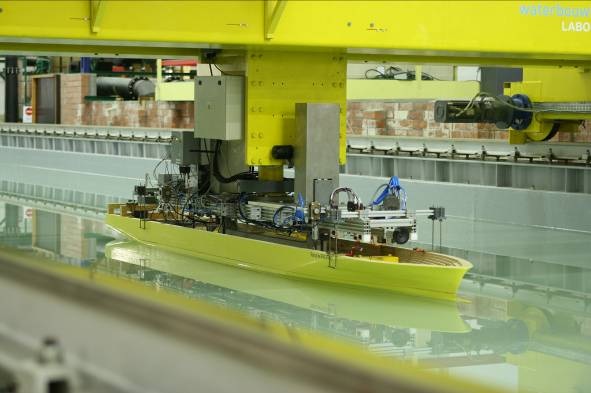 |  |
| In captive mode, the ship model is connected to the carriage by means of a mechanism which allows free heave and pitch; roll can be steered or free. In the horizontal plane, a rigid connection is provided. | In free running mode, the towing carriage follows and monitors the position of the ship model by means of laser beams. |
 | "  |
Wave generator
The piston type wave maker, allowing generation of both regular and irregular waves, is driven by an electro-hydraulic unit with following kinematic characteristics:
| Stroke length | 0.3 m |
| Velocity | 0.6 m/s |
| Acceleration | 4.4 m/s2 |
Auxiliary Carriages
 |  |
In order to carry out ship-ship interaction tests, the tank is equipped with a running auxiliary carriage allowing a second ship model to perform a prescribed speed history along a straight trajectory, with a maximum speed of 1.2 m/s. This running carriage is particularly useful for encountering or overtaking tests. | A fixed auxiliary carriage can be attached to the main carriage allowing a second ship to be attached to the towing carriage. The longitudinal movement of this second ship can either be fixed or slightly moved during a test. The fixed carriage can be used for lightering operations or ship-tug interaction tests. |
Control and data acquisition
The three horizontal motion modes, the roll mode, the wave generator, the steering and propulsion devices of the ship, the auxiliary carriages and other external devices are controlled by a PC and seven PIOCs (Programmable Input Output Control). The PIOCs also assure the sampling of the analogue input signals:
| < | PIOC |
| Number of channels | 7 x 24 |
| Resolution | 16 bit |
| Max. sampling frequency | 200 Hz |
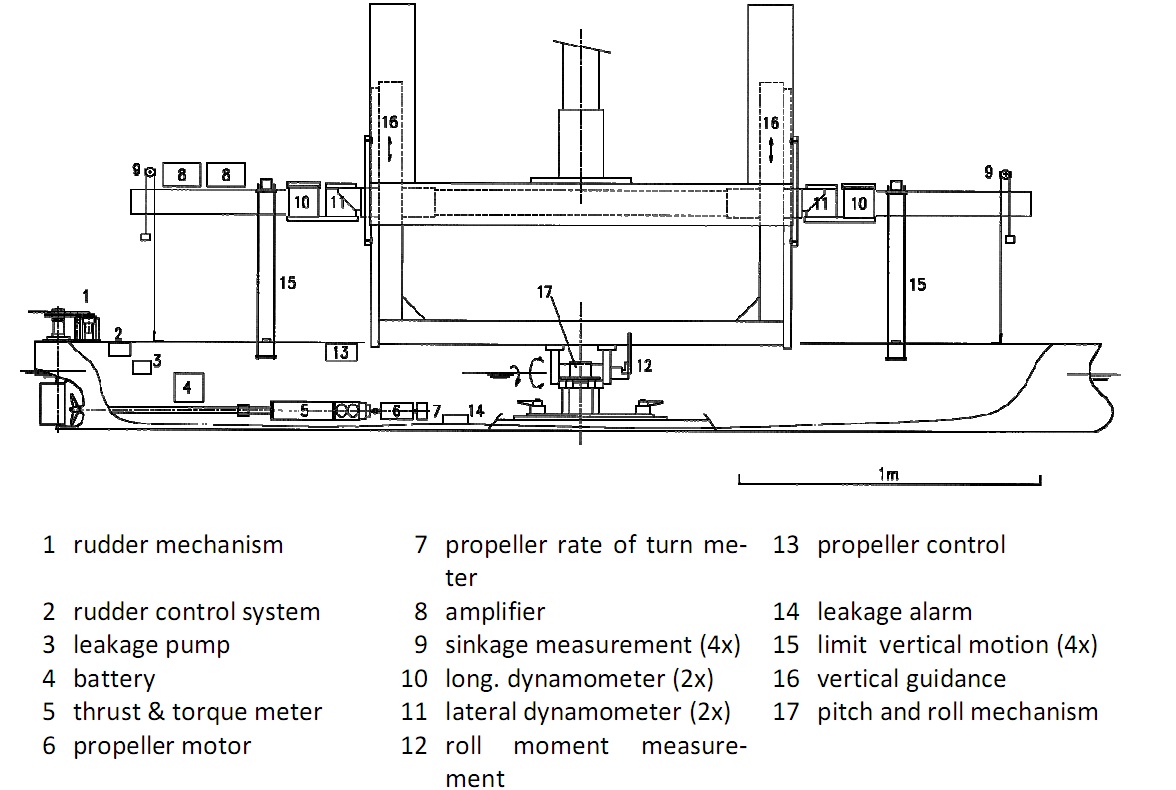
Instrumentation
- 4 x 2 dynamometers for longitudinal and lateral forces (20, 50, 100, 200 N);
- dynamometers for roll moment;
- measurement of propeller rpm;
- 3 propeller thrust and torque dynamometers (30 N, 0.5 Nm);
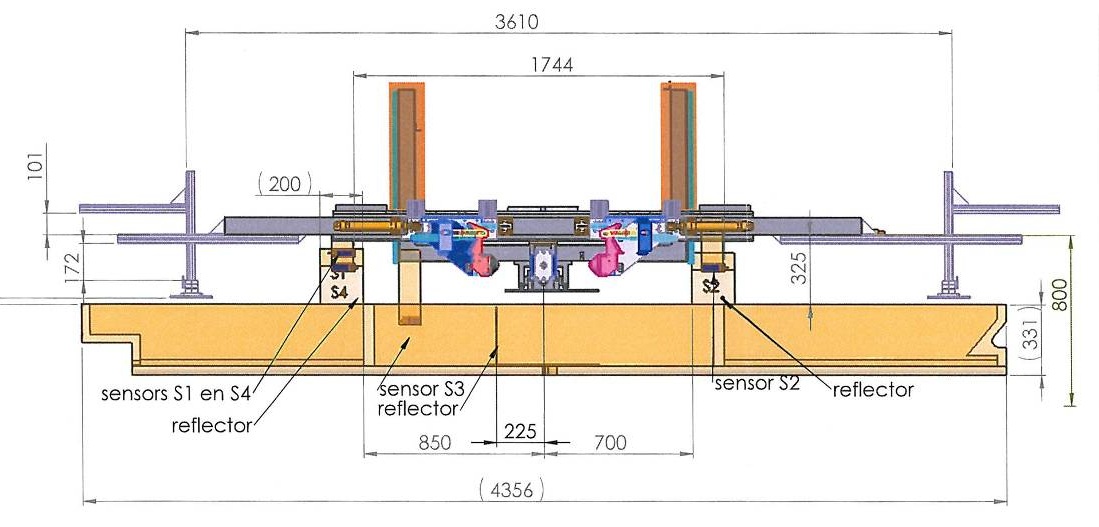
- measurement of vertical motion (due to squat or wave action) at 4 measuring posts;
- measurement of rudder angle;
- 5 rudder force and moment dynamometers (50 N, 2 Nm);
- wave height measurement devices;
- custom instrumentation such as Z-drives, lateral thrusters, etc. with steering capabilities and force measurements;
- visuals system to assess water and wave actions.
Applications
Determination of manoeuvring simulation models by means of captive model tests, with special emphasis on harbour manoeuvres:

- large range of ship speeds (ahead and astern);
- large drift angles;
- rudder action;
- large range of propeller rates (ahead and astern);
- very shallow water (typical under keel clearance: 7 to 20% of draft
Manoeuvring behaviour in restricted waters:

- bank effects;
- navigation in canals;
- berthing;
- ship-ship interaction tests;
- captive seakeeping tests, for investigating vertical ship motions caused by waves in shallow water and/or manoeuvring in waves;
- free running tests: zigzag trials, acceleration tests, crash stops etc.